BEACON[SP'22] #
BEACON : Directed Gray-Box Fuzzing with Provable Path Pruning [SP'22]
事前知識 #
Fuzzing の分類 - 目的
- Directed ~ : プログラムの特定の箇所を集中的にテスト
- 用途に関しては AFLGo を参照
- Coverage-guided ~ : プログラム全体をテスト
Fuzzing の分類 - プログラムから得られる情報
- Black-box ~ : 無し (+ プログラムの出力)
- Gray-box ~ : 計装によるフィードバック
- White-box ~ : (動的)プログラム解析 (e.g. 記号実行) による情報
概要 #
目標 #
Directed Fuzzing において:
- なるべく早い段階での枝刈り
- なるべく多くのパスの枝刈り
- 低オーバーヘッド
以上を実現するために…
- 目的箇所から遡り、そこに到達するための**必要条件**を求める
- 各変数に関する条件を求める
- 必要条件を満たさないパスを枝刈り
課題 #
既存の Directed Fuzzer での課題:
- 無駄なパスを大量に実行している
- 無駄なパス:目的の箇所に到達しないパス
- 記号実行を使っている (Savior[SP'20])
- 記号実行はスケールしない
- 充足不能な条件に時間を浪費
- ヒューリスティックを使っている (AFLGo[CCS'17], Hawkeye[CCS'18])
- 目的の箇所に到達する保証が無い
提案手法 #
手法を一言で:目的箇所に到達するための事前条件を静的に求め、それを満たさないパスは早期に枝刈り
- 目的箇所から遡り、そこに到達するための**必要条件**を求める
- 各変数に関する条件を求める
- 必要条件を満たさないパスを枝刈り
→ 区間抽象化による静的解析での 2 つの最適化を提案:
- Relationship Preservation (後述)
- Bounded Disjunction (後述)
結果 #
- Directed gray-box fuzzer : ave. 11.50x faster
- Coverage-guided fuzzer : ~10.92x faster
- 10 new CVEs
準備 #
区間抽象化による静的解析 #
以下を順番に見る:
- Data-Flow Value (DFV)
- DFV の更新方法
- DFV のマージ方法
Data-Flow Value (DFV) #
各変数の値を(a,b)のような形の区間で抽象化する
e.g.:
a:[20,∞)b:[0,0]c:(-∞,∞)
DFV の更新方法 #
更新方法は 2 つ:
- 代入命令
- e.g.
x = 10;→x:
- e.g.
- 条件分岐命令
- e.g.
- Then 節 →
x: - Else 節 →
x:
- Then 節 →
- e.g.
ただし:
- 当該変数のみ更新
- その他の変数は変更せずに伝播
DFV のマージ方法 #
マージ対象の区間全てを含む(最小の)区間を求める:

式で(ラフに)書くと:
- 各変数に関して、
精度が落ちる場合がある:
- 上の 3. の場合: は精度低下の原因
具体例 #
例: (順方向)
各行直後でのプログラムの値
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
パスの合流
- 1 行目 →
a: ,b: ,c: - 2 行目 →
a: ,b: ,c: - 3 行目 →
a: ,b: ,c: - 4 行目 →
a: ,b: ,c: - 5 行目 →
a: ,b: ,c: - 6 行目 →
a: ,b: ,c: - 7 行目 →
a: ,b: ,c: - 8 行目 →
a: ,b: ,c:
定式化 #
| DFV | dict[変数, 区間] |
| 解析の方向 | 順方向・逆方向 |
| 伝達関数 | 参照 |
| 境界条件 | 全ての変数に関して |
| パスの合流 | 参照, 各変数に関して |
| 初期化 | 全ての変数に関して |
以降、次を仮定する:
- 解析の開始: Fuzzing における目的箇所
- 解析の方向: 逆方向
区間抽象化における精度低下の原因 #
変数間の関係は追わないために精度が落ちる例 #
crash() に到達する条件は? (crash() から遡る)
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
この時点で x, z に関する情報はないため、y==x-z の関係式は使えない
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
Q. より正確な x の事前条件は?
マージする時に精度が落ちる例 #
crash() に到達する条件は? (crash() から遡る)
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
- 2 行目 →
x: ,y: - 3 行目 →
x: ,y: - 4 行目 →
x: ,y: - 5 行目 →
x: ,y: - 6 行目 →
x: ,y: - 7 行目 →
x: ,y: - 8 行目 →
x: ,y:
Q. より正確な x の事前条件は?
BEACON の手法 #
事前条件の計算 #
Fuzzing までの流れ:
- 区間抽象化による事前条件の計算 w/ 最適化
- 計装 : 事前条件を満たさない場合、枝刈り
- CFG 上での Reachability 解析
- 分岐箇所に計装
- 計装済みバイナリを用いて fuzzing (省略)
区間抽象化による静的解析での最適化を提案:
- Relationship Preservation
- Bounded Disjunction
最適化 1. Relationship Preservation #
変数間の関係式を追跡し精度向上
手順:
- 変数間の演算 (e.g.
y==x-z) は別で記憶しておく- x→
(-∞,∞), y→(a,b)と仮定
- x→
- (伝播させる)
- 演算結果の変数 (e.g.
z) に対する制約が判明 → 式 (e.g.x-z) の制約にする - 式の制約から、演算元の変数 (e.g.
x) の制約を導出する
Motivating Example 1 を用いた具体例:
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
追跡中の関係式:
y==x-z
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
追跡中の関係式:
y==x-z← これを用いてxの制約を更新
- 3 行目 →
x: ,y: ,z: - 4 行目 →
x: ,y: ,z: - 5 行目 →
x: ,y: ,z:
追跡中の関係式:
y==x-z← これを用いてxの制約を更新
最適化 2. Bounded Disjunction #
複数の制約を持てるようにする、パス合流地点での精度低下を防ぐ
| DFV | dict[変数, 区間]list[dict[変数, 区間]] ただし数には上限あり |
| 解析の方向 | 逆方向 |
| 伝達関数 | 参照 |
| 境界条件 | 全ての変数に関して |
| パスの合流 | 下を参照 |
| 初期化 | 全ての変数に関して |
- 各ポイントで複数のパスの条件を別々で持つ
- ただし、別々でもてる数には上限あり (ref. パス爆発)
- そのために、以下を変更する必要がある
- DFV
- マージ方法
DFV に対する変更 #
- DFV:
list[dict[変数, 区間]]- → マージによる精度の損失を回避できる
- ただし、数には上限を設ける
- パスの数は指数的に増える → 制約数が爆発してしまう
具体例:
- 2 行目 → [{
x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
- 2 行目 → [{
x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
- 2 行目 → [{
x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
- 2 行目 → [{
x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
- 2 行目 → [{
x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
- 2 行目 → [{
x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
- 2 行目 →
[{x: ,y: }, {x: ,y: }] - 3 行目 → [{
x: ,y: }] - 4 行目 → [{
x: ,y: }] - 5 行目 → [{
x: ,y: }] - 6 行目 → [{
x: ,y: }] - 7 行目 → [{
x: ,y: }] - 8 行目 → [{
x: ,y: }]
マージ方法に対する変更 #
なるべく精度が落ちないようにマージする
マージ方法:
- リストの長さが上限に
- 達していない場合:
- リストに制約を追加
- 達している場合:
- 以下の が最小になるような制約 (
dict[変数, 区間]) を見つけ、その制約にマージ
- 以下の が最小になるような制約 (
- 達していない場合:
の直感的な意味
- 重なる領域がある →
- 重なる領域がない → スキマの幅

具体例:
- に対して を追加したい。
- Q. は と のどちらにマージすべき?

事前条件に基づく計装 #
計装方法:
- プログラムを SSA 形式に変換し、代入箇所に計装する。
- 変数の代入箇所で事前条件のチェック ✅
- ある変数 が のみ依存している場合、 には計装しない。
- のチェックを行えば十分
具体例:
解析結果:
- 3 行目 →
x: ,y: ,z:
→ 1 行目直後に計装
解析結果:
- 2 行目 →
[{x: ,y: }, {x: ,y: }]
→ 1 行目直後に計装
CFG 上での Reachability 解析 #
Fuzzing までの流れ:
- 区間抽象化による事前条件の計算 w/ 最適化
- 計装 : 事前条件を満たさない場合、枝刈り
- CFG 上での Reachability 解析
- 分岐箇所に計装
- 計装済みバイナリを用いて fuzzing (省略)
目的箇所に到達し得ないパスは早期に枝刈り:
評価 #
- 環境: Intel Xeon E5-1620 v3 (3.50GHz, 4core), 64GB of RAM, ubuntu 16.04
- 実装: LLVM bitcode 上で静的解析 + 計装
- Fuzzing engine: AFLGo[CCS'17] (計装済みバイナリを AFLGo で fuzzing)
- 比較対象:
- Directed:
- AFLGo[CCS'17] : 入力と目的箇所との"距離"を導入。“距離"を基に入力を変化させる。
- Hawkeye[CCS'18] : 関数の呼び出し履歴を考慮した"距離"の導入。同上。
- Directed:
- バグを含むリアル検体
Project Program Version Input format Num. CVEs Binutils cxxfilt 2.26 TXT 2 objdump 2.28 ELF 7 objcopy 2.28 ELF 4 Libjpeg cjpeg 2.04 JPG 1 cjpeg 1.98 JPG 1 Ming swftophp 0.4.7 SWF 7 swftophp 0.4.8 SWF 10 Libxml2 xmllint 20902 XML 4 Lrzip lrzip 0.631 ZIP 2 Libpng pngimage 1.6.35 PNG 1 pdftoppm 0.74 PDF 3 Libpoppler pdftops 0.74 PDF 1 pdfdetach 0.71 PDF 3 Libav avaconv 12.3 AVI/AAC 5 - Bounded Disjunction : 5
実験 #
Research Questions:
- RQ1: 既存の fuzzing engine に比べて効率よくバグを再現できるか
- RQ2: 1. 事前条件による枝刈り と 2. Reachability 解析 それぞれの効果はどの程度か
- RQ3: 抽象解釈における 2 つの最適化それぞれの効果はどの程度か
- RQ4: Fuzzing 時のオーバーヘッドはどの程度か
実験 1: 既存の fuzzing engine とのバグ再現における比較 #
CVE が割り当てられたバグを fuzzing で再現できるか?
見方:
- : AFLGo[CCS'17] でバグを再現するまでの時間
- : BEACON での静的解析にかかった時間
- : BEACON で計装したバイナリでバグを再現するまでの時間
- : 実行回数
- : 枝刈りしたパスの割合
- T.O. : Time Out (>120h)
結果:
AFLGoとの比較表
| Program | CVE | ||||||
|---|---|---|---|---|---|---|---|
| ming | 2016-9827 | 1.25h | 43s | 0.31h | 0.32h | 0.28M | 80.7% |
| 2016-9829 | T.O. | 18s | 5.54h | 5.55h | 5.25M | 82.6% | |
| 2016-9831 | 2.52h | 16s | 0.62h | 0.62h | 0.47M | 84.3% | |
| 2017-7578 | 2.43h | 20s | 0.29h | 0.30h | 0.26M | 80.8% | |
| 2017-9988 | 37.99h | 20s | 1.45h | 1.46h | 1.26M | 72.3% | |
| 2017-11728 | T.O. | 27s | 11.14h | 11.15h | 23.70M | 84.6% | |
| 2017-11729 | 4.34h | 27s | 1.02h | 1.03h | 2.02M | 82.0% | |
| ming | 2018-7868 | T.O. | 21s | 1.75h | 1.76 h | 3.91M | 85.8% |
| 2018-8807 | 10.71h | 16s | 1.89h | 1.89h | 4.42M | 83.9% | |
| 2018-8962 | 35.39h | 20s | 1.92h | 1.93h | 5.96M | 88.8% | |
| 2018-11095 | 60.29h | 20s | 3.13h | 3.14h | 6.07M | 84.9% | |
| 2018-11225 | 34.23h | 17s | 2.84h | 2.84h | 4.33M | 91.7% | |
| 2018-11226 | 37.59h | 18s | 3.98h | 3.99h | 5.25M | 89.0% | |
| 2018-20427 | T.O. | 21s | 3.14h | 3.15h | 7.81M | 86.2% | |
| 2019-9114 | T.O. | 22s | 3.53h | 3.54h | 7.08M | 84.0% | |
| 2019-12982 | T.O. | 20s | 2.47h | 2.48h | 4.12M | 82.3% | |
| 2020-6628 | T.O. | 24s | 3.91h | 3.92h | 8.76M | 84.3% | |
| lrzip | 2017-8846 | 5.05h | 61s | 1.78h | 1.80h | 1.32M | 86.4% |
| 2018-11496 | 3.01h | 68s | 1.17h | 1.19h | 0.89M | 92.4% | |
| cxxfilt | 2016-4491 | 7.74h | 2,229s | 1.38h | 2.00h | 7.69M | 95.9% |
| 2016-6131 | 5.88h | 2,258s | 0.84h | 1.47h | 3.76M | 94.9% | |
| xmllint | 2017-5969 | 2.07h | 5,381s | 0.17h | 1.66h | 0.33M | 95.1% |
| 2017-9047 | T.O. | 5,238s | 16.55h | 18.01h | 16.46M | 83.6% | |
| 2017-9048 | T.O. | 7,049s | 18.00h | 19.96h | 18.47M | 85.1% | |
| 2017-9049 | TO. | 5.672s | 31.56h | 33.14h | 40.15M | 95.2% | |
| 2017-8392 | T.O. | 2,654s | 8.42h | 9.16h | 1.97M | 79.3% | |
| 2017-8396 | T.O. | 2,909s | 39.03h | 39.84h | 95.85M | 91.2% | |
| 2017-8397 | T.O. | 3,067s | 83.46h | 84.31h | 261.2M | 96.1% | |
| objdump | 2017-8398 | T.O. | 2,825s | 40.51h | 41.29h | 166.3M | 96.0% |
| 2017-14940 | T.O. | 3,420s | 61.38h | 62.33h | 41.13M | 86.1% | |
| 2017-16828 | T.O. | 3,326s | 22.24h | 10.59h | 4.32M | 94.3% | |
| 2018-17360 | T.O. | 2,950s | 45.69h | 46.51h | 121.55M | 92.6% | |
| 2017-7303 | T.O. | 2,033s | 20.09h | 20.65h | 31.75M | 85.7% | |
| objcopy | 2017-8393 | T.O. | 2,484s | 19.78h | 20.47h | 20.21M | 90.5% |
| 2017-8394 | T.O. | 2,671s | 4.46h | 5.20h | 4.74M | 92.3% | |
| 2017-8395 | T.O. | 2,608s | 3.83h | 4.55h | 4.31M | 96.9% | |
| cjpeg | 2018-14498 | 49.78h | 93s | 11.46h | 11.46h | 20.12M | 91.2% |
| 2020-13790 | 7.34h | 106s | 3.98h | 4.01h | 19.78M | 90.4% | |
| pngimage | 2018-13785 | T.O. | 85s | 3.22h | 3.23h | 65.81M | 91.3% |
| pdftoppm | 2019-10872 | T.O. | 4,904s | 102.90h | 104.26h | 2.98M | 76.5% |
| 2019-10873 | T.O. | 5,899s | 90.25h | 91.89h | 3.76M | 69.4% | |
| 2019-14494 | T.O. | 4,153s | 95.35h | 96.50h | 3.13M | 67.2% | |
| pdftops | 2019-10871 | T.O. | 6,593s | 62.54h | 64.37h | 12.94M | 75.2% |
| 2018-19058 | T.O. | 2,950s | 73.98h | 74.80h | 14.60M | 86.3% | |
| pdfdetach | 2018-19059 | T.O. | 2,686s | 82.46h | 83.21h | 14.21M | 81.1% |
| 2018-19060 | T.O. | 2,995s | 92.65h | 93.48h | 13.76M | 70.1% | |
| 2018-11102 | T.O. | 14,335s | 89.57h | 93.55h | 6.00M | 53.4% | |
| 2018-11224 | T.O. | 14,893s | 98.20h | 102.34h | 7.65M | 69.8% | |
| avconv | 2018-18829 | T.O. | 14,623s | 47.97h | 52.03h | 3.44M | 56.7% |
| 2019-14441 | T.O. | 16,600s | 52.86h | 57.47h | 6.89M | 51.3% | |
| 2019-14443 | T.O. | 14,239s | 95.81h | 99.77h | 13.49M | 52.6% | |
| Avg. | 11.50x | 82.9% |
- バグ再現 (全 51 個)
- AFLGo : 34
- BEACON : 51
- 高速化
- 最低: 1.2x
- 最高: 68.5x
- 平均: 11.50x
- 枝刈り
- ほとんどの場合で
80%以上枝刈り
- ほとんどの場合で
実験 2: 事前条件による枝刈りと Reachability 解析による枝刈りの効果 #
BEACON では 2 つの枝刈りを行っている:
- 各変数の事前条件のによる枝刈り
- Reachability 解析による枝刈り (Path Slicing)
実験設定:
| Path Slicing | 事前条件での枝刈り | Relationship Preservation | Bounded Disjunction | |
|---|---|---|---|---|
| BEACON | ✅ | ✅ | ✅ | ✅ |
| BEACON* | ✅ | ❌ | - | - |
結果:
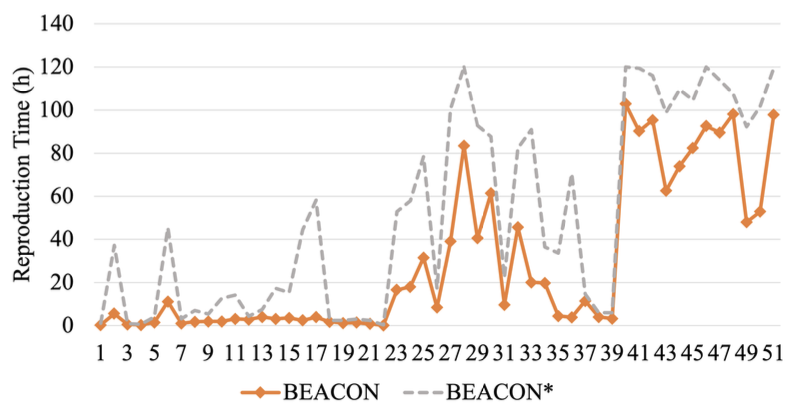
- 見方
- 横軸: 51 個 の CVE
- 縦軸: バグの再現にかかった時間 (h)
- BEACON* → 再現できないバグ有
- Time Out (>120h)
- BEACON の方が速く再現できる
- 1.1x ~ 18.4x 速い
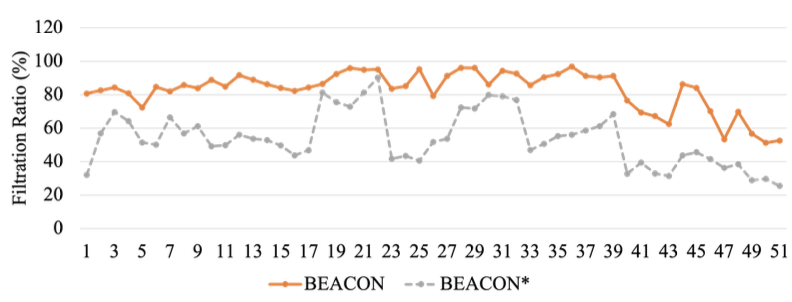
- 見方
- 横軸: 51 個 の CVE
- 縦軸: 枝刈りできたパスの割合
- 事前条件による枝刈り
- 平均で 29.1% 多く枝刈りできる
- → 事前条件での枝刈りは fuzzing の効率化に貢献
実験 3: 抽象解釈における 2 つの最適化それぞれの効果 #
(事前条件を求めるための) 抽象解釈における最適化:
- Relationship Preservation
- Bounded Disjunction
実験設定:
| Path Slicing | 事前条件での枝刈り | Relationship Preservation | Bounded Disjunction | |
|---|---|---|---|---|
| BEACON | ✅ | ✅ | ✅ | ✅ |
| BEACON* | ✅ | ❌ | - | - |
| BEACON- | ✅ | ✅ | ✅ | ❌ |
| BEACON- | ✅ | ✅ | ❌ | ✅ |
結果:
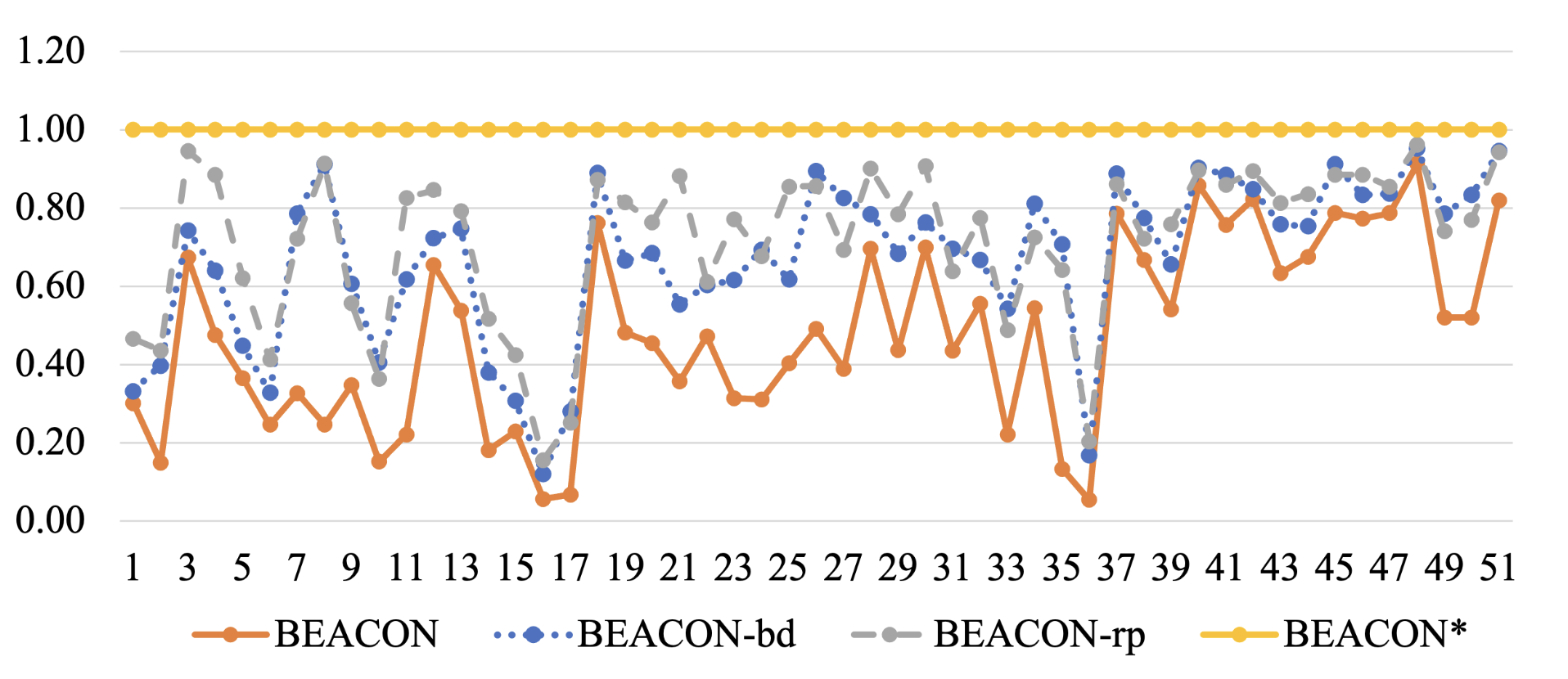
- 読み方
- 横軸: 51 個 の CVE
- 縦軸: BEACON* に対するバグ再現までの時間の割合
- 観察
- BEACON- → BEACON : 1.05x ~ 4.9x 速い
- BEACON- → BEACON : 1.05x ~ 5.34x 速い
- 2 つの最適化が静的解析の精度向上に貢献している
- 枝刈りの精度向上 → fuzzing の効率化
実験 4: Fuzzing 時のオーバーヘッド #
- : プログラムの実行回数
- : 計装無しの実行時間
- : 計装有りの実行時間 (比較のため、枝刈りはせず条件比較のみ)
| Project | Overhead | |||
|---|---|---|---|---|
| Ming | 126K | 4.52m | 4.80m | 6.2% |
| Binutils | 2.38M | 2.48h | 2.51h | 1.2% |
| Libxml | 25K | 0.63h | 0.65h | 3.2% |
| Lrzip | 1.07M | 1.43h | 1.57h | 9.8% |
| Libjpeg | 2.97M | 0.59h | 0.61h | 3.4% |
| Libpng | 1.41M | 7.55h | 8.01h | 6.1% |
| Libpoppler | 1.21M | 23.73h | 25.27h | 6.5% |
| Libav | 7.62M | 23.87h | 26.13h | 9.5% |
- 最大 9.8%, 平均 5.7%のオーバーヘッド
- 許容範囲内であるだろう
関連研究 #
| 入力 | 効率的か | オーバーヘッド | 効率化のための工夫 | |
|---|---|---|---|---|
| AFLGo[CCS'17] | src+loc | ❌ | 小 | “距離” の導入 |
| Hawkeye[CCS'18] | src+loc | ❌ | 小 | “距離” の計算方法の改善 |
| FuZZGuard[SEC'20] | src+loc | ❌ | 中(?) | 機械学習ベースの手法、“良い"入力を学習させる |
| Savior[SP'20] | src | ❌ | 大 | 1. ConcEx 2. 怪しい箇所の自動特定 |
| BEACON[SP'22] | src+loc | ✅ | 中 | 枝刈り |
- 略語
- src: ソースコード
- loc: プログラム中の目的箇所
- ConcEx: Concrete Execution
提案手法との関連 #
Transient Attack 関連の論文は以下に分類できる:
- 攻撃
- Gadget 探索
- CPU のテスト
- 防御
- Transient Instruction の無効化
- メモリ隔離 (memory isolation)
- アーキテクチャレベルの隔離 (architectural isolation)
- 安全な投機実行 (secure speculative execution)
- Covert Channel の無効化
- 時間的隔離 (time/temporal isolation)
- その他
- 検証系
- (学部) 提案手法: 動的テイント解析 + 動的キャッシュシミュレーター
- メモリアクセスに関する静的解析を行うことで、枝刈りを行える可能性
- その際の静的解析の参考になる
- Gadget 探索:
- 「静的解析で得られた情報を基に枝刈り」というアイデアは活かせそう
- Directed-fuzzer は網羅的な Gadget 探索には向かない
- が、fuzzing 効率化という面では役に立つ
- e.g. 入力形式が複雑な場合に、正しい入力の発見を効率化
- が、fuzzing 効率化という面では役に立つ